Micropython之DIY循迹智能小车
作者:CQITer小编 时间:2018-06-26 09:37

AI作为现代社会发展的主流,也是未来发展的方向,它可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。很多快递公司已经能够实现机器人自动搬运,自动扫码,自动运输的功能,送餐机器人相信大家已经见到过,大大的减少了人力成本,而且减少了送错餐的机率,下面带大家了解一下送餐机器人的原理,带大家做一个循迹智能小车。这样的小车在科学考察探测车上也有广阔的应用前景,在科学考察中,有很多危险且人们无法涉足的地方,这时,智能科学考察车就能够派上用场,在它上面装上摄像机,代替人们进行许多无法进行的工作。那么,我们就搞起来吧!!!(*^▽^*)

AI作为现代社会发展的主流,也是未来发展的方向,它可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。很多快递公司已经能够实现机器人自动搬运,自动扫码,自动运输的功能,送餐机器人相信大家已经见到过,大大的减少了人力成本,而且减少了送错餐的机率,下面带大家了解一下送餐机器人的原理,带大家做一个循迹智能小车。这样的小车在科学考察探测车上也有广阔的应用前景,在科学考察中,有很多危险且人们无法涉足的地方,这时,智能科学考察车就能够派上用场,在它上面装上摄像机,代替人们进行许多无法进行的工作。那么,我们就搞起来吧!!!(*^▽^*)
一、实验器材
1、TPYBoard v
102开发板 1块
2、电机驱动模块L298N 1个
3、直流电机 2个
4、小车底盘 1个
5、4路循迹模块 1个
6、电源开关 1个
7、5号电池 4节

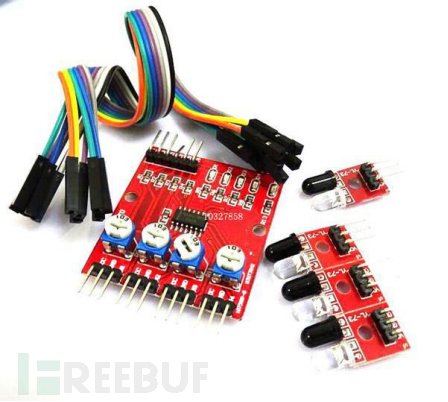
二、4路循迹模块
1、
什么是循迹模块
循迹模块检测黑线的原理是红外发射管发射光线到路面,红外光遇到白底则被反射,红外接收管接收到反射光,此时接收管导通,模块的输出端为低电平,即引脚的IO电平输出0,模块的红色发光二极管处于点亮状态;当红外光遇到黑线时则被吸收,红外接收管没有接收到反射光,此时接收管一直处于关闭状态,模块的输出端为高电平,即引脚的IO电平输出1,模块的红色发光二极管处于熄灭状态。模块的检测灵敏度可以通过循迹模块上的电位器进行调节。4路循迹模块输出端口OUT可直接与单片机IO口连接即可,连接方式:首先,把循迹模块跟中间驱动板连接起来,一共有4路,按照顺序接起来就行;
其次,将控制板跟TPYBoard v102连接起来VCC-VCC;GND-GND;OUT1-X1;OUT2-X2;OUT3-X3;OUT4-X4。注意四路循迹模块的IN1-IN4是和OUT1-OUT4一一对应的。

其次,将控制板跟TPYBoard v102连接起来VCC-VCC;GND-GND;OUT1-X1;OUT2-X2;OUT3-X3;OUT4-X4。注意四路循迹模块的IN1-IN4是和OUT1-OUT4一一对应的。
三、电机驱动模块
1、什么是电机驱动模块
电机驱动模块主要是可以控制电机的运行:调速、运行、停止、步进、匀速等操作。
2、L298N的连接及使用方法
责任编辑:CQITer新闻报料:400-888-8888 本站原创,未经授权不得转载
继续阅读




;){kind=link}
;){kind=link}
;){kind=link}
;){kind=link}